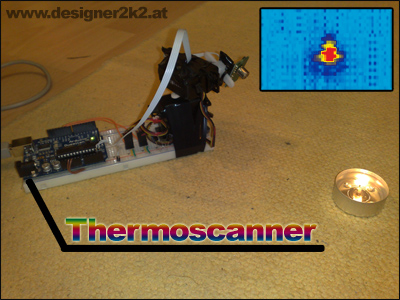
Thermoscanner
Thermography was never so easy/cheap 
Take the hardware of the 3d Scanner, and just replacing the distance sensor with a thermopile. Thats it, and there it goes, the Thermoscanner!
Whats needed:
Hardware:
This time im using tape, as i was running out of zip ties 
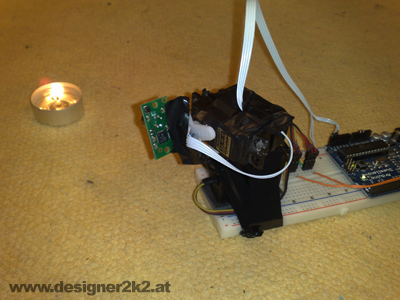
Just combine the 2 RC Servos and stick the TPA81 onto it.
Theorie:
The TPA81 provides 1x8 Pixels with 5.12° by 6°. The Sensor is mounted verticaly.
To Increase the resolution its stepping 1° horizontal and about 2° verticaly.
This makes is possible to get a real nice resolution, as can be seen in the top picture showing the candle.
The Thermal resolution from the TPA81 is 1°, but its jumping +-1° so measuring a human in a room is tricky...
(Pictrue from me on the couch)
Software:
The Software is splitted, on part Arduino Code, and the other is Processing.
The Arduino is only listening to the Processing Application, and this is then drawing a nice picture from it.
Processing makes the picture above, below is it processed in false color:
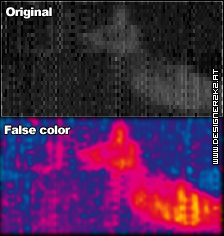
This is me on a couch wearing a tshirt and shorts, my face/arms/legs are hotter as they are not covered by clothing.
Taking this picture took about 30seconds with the code provided below.
Arduino Code:
//test by d2k2 24.09.2009
#include <AFSoftSerial.h>
#include <Wire.h>
#define TPA81ADDR (0xd0>>1)
#include
Servo myServoPan; // create servo object to control a servo
Servo myServoTilt; // create servo object to control a servo
AFSoftSerial mySerial = AFSoftSerial(3, 2);
char CurrentServo;
int value;
int valueA; //Storage
int valueB;
int fresh = 0;
int Read = 0;
int runVal = 0;
void setup()
{
Wire.begin(); // join i2c bus (address optional for master)
myServoPan.attach(9); // attaches the servo on pin 9 to the servo object
myServoTilt.attach(10); // attaches the servo on pin 10 to the servo object
pinMode(13, OUTPUT);
Serial.begin(57600);
Serial.println("Scanturm V0.1");
}
void loop() // run over and over again
{
get_keyboard_commands();
}
void get_keyboard_commands() {
myServoPan.write(valueA);
myServoTilt.write(valueB);
if ( Serial.available()) {
// read in a string
Read = Serial.read();
if (Read == 200){
runVal = 0;
// Serial.println("Reset");
};
switch (runVal) {
case 0:
runVal = 1;
break;
case 1:
valueA = Read;
runVal = 2;
break;
case 2:
valueB = Read;
runVal = 3;
case 3:
SendTPA();
/*
Serial.print(": ");
Serial.print(val);
Serial.println("$");
*/
//runVal = 1;
break;
}
}
}
void SendTPA(){
//Send the TPA81 Data back to the PC:
byte b;
int i;
for (i=1; i<=9; i++)
{
Wire.beginTransmission(TPA81ADDR);
Wire.send(i);
Wire.endTransmission();
Wire.requestFrom(TPA81ADDR, (int) 1);
while(Wire.available() < 1)
{ ; }
b = Wire.receive(); // receive a byte as character
Serial.print(b, DEC);
Serial.print(";");
}
Serial.println("");
}
Processing Code:
//d2k2 24.09.2009 shows values from the TPA81
//prestage for putting the sensor on the scan turrent
import processing.serial.*;
Serial myPort; // Create object from Serial class
int lf = 10; // Linefeed in ASCII
String myString;
int[] val = {1,1,1,1,1,1,1,1,1};
int MaxT=100;
int MinT=20;
int pan = 40;
int tilt = 80;
String[] list = null;
int MaxT2 = 0;
int MinT2 = 255;
boolean result = false;
boolean run = false;
long time;
long lastrun = 0;
long runT;
void setup()
{
size(400, 400);
String portName = Serial.list()[1];
myPort = new Serial(this, portName, 57600);
myPort.buffer(1);
}
void draw()
{
time = millis();
runT = lastrun - time;
String myTest = "";
if ( myPort.available() > 0) { // If data is available,
myString = myPort.readStringUntil(lf);
if (myString != null)
{
list = split(myString, ';');
myTest = list[0];
if(int(myTest)>0)
{
result = true;
val[1] = int(list[8]);
val[2] = int(list[7]);
val[3] = int(list[6]);
val[4] = int(list[5]);
val[5] = int(list[4]);
val[6] = int(list[3]);
val[7] = int(list[2]);
val[8] = int(list[1]);
val[0] = int(list[0]);
//check for new max/min events
if(MaxT2<max(val))
{
MaxT2 = max(val);
}
if(MinT2>min(val))
{
MinT2 = min(val);
}
//Draw another Line, right at the Pan Position
//Pan is about everywhere from 10 to 170
//so i need to update every Pan Pixel and just try it like that now
float Col = 0;
for(int i = 1;i<9; i = i+1){
Col = map(val[i],MinT,MaxT,0,255);
color drp = color(Col,Col,Col);
for(int i2 = 1; i2 < 5; i2 = i2+1){
set(pan+pan, (i*4)+75+i2+tilt+tilt+4*i-100,drp);
}
for(int i2 = 1; i2 < 5; i2 = i2+1){
set(pan+1+pan,(i*4)+75+i2+tilt+tilt+4*i-100,drp);
}
}
}
}
//background(255); // Set background to white
//Draw them 9 Pixels in a line:
/*
int Size = 45;
float Col = 0;
for (int i = 1; i < 9; i = i+1) {
rect((Size*i)-Size+5, 5, Size, Size);
Col = map(val[i],MinT,MaxT,0,255);
fill(0,0,Col);
}
*/
}
if(millis()>lastrun)
{
if(run == true)
{
//Now i need to check if i got a result:
if(result == true)
{
//Now i need to check if im at the end of my motion:
if(pan < 150)
{
//Now i can move :)
pan = pan + 1;
SetServo();
lastrun = millis()+100;
}
else
{
run = false;
}
}
}
}
}
void keyPressed() {
if( key == '6'){
pan = pan+1;
SetServo();
println("Pan: " + pan);
println("Tilt: " + tilt);
}
if( key == '4'){
pan = pan-1;
SetServo();
println("Pan: " + pan);
println("Tilt: " + tilt);
}
if( key == '8'){
tilt = tilt-2;
SetServo();
println("Pan: " + pan);
println("Tilt: " + tilt);
}
if( key == '2'){
tilt = tilt+2;
SetServo();
println("Pan: " + pan);
println("Tilt: " + tilt);
}
if( key == '5'){
SetServo();
println("Pan: " + pan);
println("Tilt: " + tilt);
}
if( key == '1'){
pan = 40;
SetServo();
println("Pan: " + pan);
println("Tilt: " + tilt);
}
if( key == '3'){
run = true;
}
}
void SetServo(){
result = false;
myPort.write(200); //init
myPort.write(tilt); //tilt
myPort.write(pan); //pan
delay(100);
myPort.write(80); //trigger read
}
Links related to this:
Arduino Forum: http://www.arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1253898939/0#0
Hack a Day: http://hackaday.com/2009/09/25/arduino-thermoscanner/
Make: http://blog.makezine.com/archive/2009/09/thermal_imaging_on_the_cheap.html
Comments powered by CComment